发布日期:2026-02-12 23:37 点击次数:192

机器之心剪辑部
昔日几年,大模子把当然谈话处理透澈重塑了。GPT 出来之前,NLP 领域的景况是:每个任务一套模子,每个场景一批数据,每个公司一条活水线,互欠亨用,领域了了。GPT 之后,这套逻辑被一个预磨练底座 + 任务微调的范式通盘替换掉了。
机器东说念主行业今天的处境,像极了 2019 年的 NLP。
不同厂商的不同风景机器东说念主,用着各自零丁的行为暗示体系,数据互不兼容,模子无法复用。作念一个新场景,基本上要重新搭一套…… 当模子与数据被深度绑定在特定风景和特定场景中,机器东说念主所展现出的技艺经常更像是一种全心调校的饰演,而不是不错迁徙、不错泛化的通用妙技。
一个只可在特定场景舞蹈的机器东说念主,和一个不错在确实生存帮你占座的机器东说念主,你会选哪个?
近日,阿里巴巴集团旗下高德的 ABot 系列具身基座模子的发布,终于让行业看到了机器东说念主进入灵通宇宙的可能。
ABot 系列包括两款基座模子:ABot-M0、ABot-N0,前者认真机器东说念主的「手」(操作),后者认真机器东说念主的「腿」(导航)。
这两款模子各放心其领域补皆了行业技艺缺口,ABot-M0 让不同风景的机器东说念主都能基于合股底座完成良好操作,ABot-N0 则让机器东说念主初次具备在确实灵通环境中实践长程复杂任务的技艺。它们在具身操作和具身导航作念到全面 SOTA,霸榜了 10 项人人巨擘评测。
但更进攻的不是这些数字,而是具身智能初次在操作和导航两条中枢链路,区分领有了合股底座。开发者不需要再为每个机器东说念主、场景重作念一套系统,而是基于这两个底座去作念进一步酌量。
若是说 GPT 的出现让 NLP 从任务专用模子转向通用基座,那么 ABot 系列的发布,象征着具身智能正在阅历相同的范式跃迁,从为每个机器东说念主、每个场景定制专用系统,转向用合股模子遮掩各类化任务的工程级底座时间。
具身智能,为什么迟迟莫得 GPT 时辰
谈话模子之是以能够演化出一种通用技艺底座,是因为它们具有合股暗示(token)、合股架构(基本基于 Transformer)以及可限度化的预磨练。从而酿成可复用、可迁徙、可捏续进化的技艺底座。
比较之下,具身智能历久缺失的,恰正是这种「合股」。昔日几年,行业永恒困在几个结构性瓶颈之中。
早先是数据层面的差异。谈话模子的磨练数据来自互联网文本,限度弘远、结构却很合股,通过合股的 token 暗示已毕限度化磨练,因此不错在合并架构上捏续堆数据、堆算力。而机器东说念主的磨练数据则是操作轨迹、导航线径和三维场景信息,这类数据聚集成本高、体式互异、自然碎屑化,远不像文本那样不错奏凯聚积成合股语料,更进攻的是他们的骨子还不同,机械臂、机器狗和东说念主形机器东说念主的数据无法通用。
本质在于行为暗示和空间建模的不合股。在具身领域,不同机器东说念主使用不同的放置频率、坐标体系和行为抒发神情:有的以要津角为中枢,有的基于结尾实践器位姿,有的接管统统坐标。这些差异看似仅仅工程已毕神情的不同,践诺上却决定了数据能否分享、模子能否迁徙。一套模子在某种硬件风景上磨练完成,并不虞味着不错奏凯迁徙到另一平台,因为行为空间自身并不兼容。
行为暗示难以合股,使得行业即便蕴蓄了大量轨迹数据,也难以整合为限度化磨练的基础;与此同期,空间表现技艺的不及进一步加重了这一问题。机器东说念主靠近的是衔接、高维、动态变化的三维物理空间,它不仅要看见,还行动会空间结构、物体干系与可行动区域。穷乏康健的三维语义建模技艺,使模子在复杂或长程任务中容易失效,鲁棒性不及。
此外,对具身来说相配进攻的导航技艺仍然高度碎屑化。比较固定工位上的机械操作,挪动意味着要靠近动态变化的环境、迅速出现的干与,以及跨场景的任务切换。不管是跨楼层送物、在市集中奴隶干事,如故城市级长程导航,导航都是具身智能迈向通用行动技艺的前提。
但现实是,好多主流门径闹翻且碎屑:一套模子用于位置导航,另一套模子用于语义导航,缺什么再补充什么。每个任务都能在局部主义上获得一定得益,却难以酿成合股技艺框架,机器磨练和适用也就无从谈起。
也正是在这么的布景下,咱们很出丑到具身智能不错像谈话模子一样领有可复用的具身底座。
从碎屑化定制到底座化复用
而高德自然具备处理这些问题的技艺,舆图与位置干事多年千里淀的大限度确实 3D 场景与空间语义钞票,恰正是具身导航中最稀缺的资源;而历久面向亿级用户的工程落地劝诫,则意味着它更纯属怎么把系统确实跑在确实环境里。
ABot-M0:先行为谈话合股,再谈复用
具身操作的中枢难题,用一句话说即是:奈何让合并套模子,独霸风景互异的机器东说念主,完成各式各样的操作任务。
ABot-M0 的解法是用「行为谈话合股」(把异构机器东说念主的行为蜕变为合股暗示)责难数据割裂与磨炼就本。为了已毕这一主义,ABot-M0 从「数据合股 — 算法鼎新 — 空间感知」三个方面进行了系统性重构。
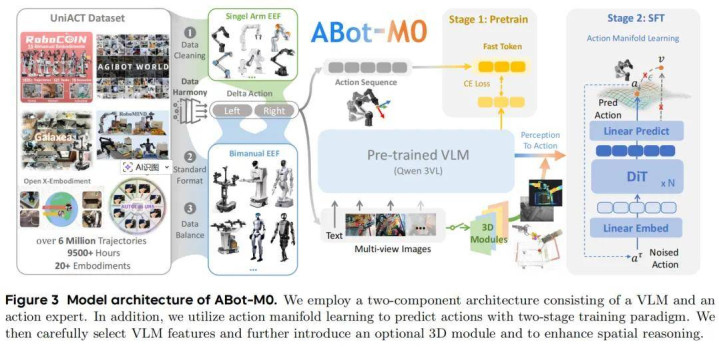
时候上,它通过合股坐标系、放置频率和增量式行为建模,把来自不同平台的操作轨迹数据买通,并构建了一个时长非凡 9500 小时包含 600 多万条轨迹、触及 20 多种具体态态的混杂磨练集。更重要的是,这套数据不是靠特有聚集堆出来的,完全基于公开数据,这也意味着这条旅途在原则上通用的。
此外,为了处理行为体式、坐标系和采样率的不一致,高德还界说了尺度化的预处理活水线:
统统行为均蜕变为结尾实践器坐标系下的增量行为(delta actions)。
旋转接管旋转向量编码以幸免奇异性。
应用「pad-to-dual」政策,在分享框架内营救单臂和双臂任务。
磨练期间在各数据集间进行均匀采样,以均衡任务和具身的分散。
这种合股的数据基础阻滞了数据集间的壁垒,通过对皆各开首的时空结构,已毕了正经的跨具身泛化。
算法层面,ABot-M0 提议了 AML(Action Manifold Learning,行为流形学习)。这个门径背后有一个直观上成立的假定:确实有用的机器东说念主行为,并不是迅速分散在统统可能的行为空间里,而是辘集在一个受物理规定和任务旁边共同塑造的低维流形上。在这个流形上学习,比在全空间暴力搜索更高效,生成的行为序列也更适应物理规定、更康健。
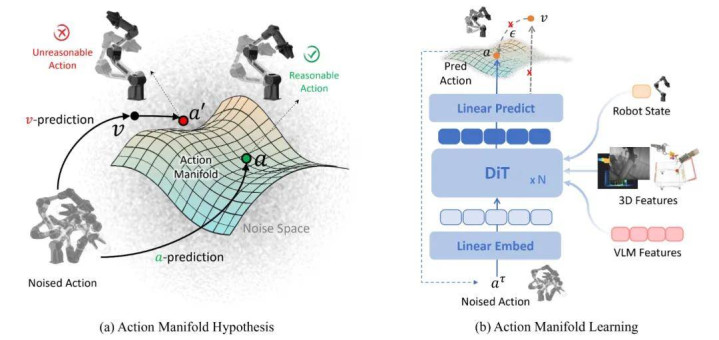
为增强空间感知,ABot-M0 还引入 3D 感知模块,增强模子对前后、遐迩、荫庇等空间语义的表现,在复杂环境中已毕更精确的操作决策。
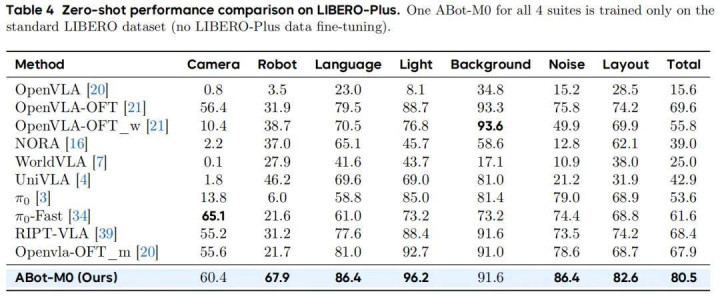
成果上,在 Libero、Libero-Plus、RoboCasa 基准测试中,ABot-M0 在包含复杂任务组合与动态场景扰动的设定下,平均任务见效用均达到 SOTA。在高难度的 Libero-Plus 基准上,ABot-M0 达到了 80.5% 的任务见效用,比此前最强决策 pi0 升迁近 30%。这个升迁幅度在工程上是挑升旨的,从 50% 到 65% 可能仅仅参数诊疗,从 50% 到 80% 意味着系统性的技艺跃升。
但这次发布更值得关心的,不是这个分数自身,而是它背后隐含的工程逻辑:一朝行为暗示被合股,数据就不错跨平台蕴蓄,kaiyun sports模子就不错捏续进化,部署成本就会系统性着落。这好比一个正向飞轮,一朝启动,成果会越来越好。
雷霆上赛季拿到了总冠军,这个赛季的发挥很强势,目前仅仅输掉7场比赛,但是有3次都是输给了马刺。亚历山大在谈到明天对阵马刺表示:没有想过这场对决,和其他比赛没有区别。其实雷霆不重视马刺,不想赢马刺是不可能的,毕竟这个赛季已经连续三次输给他们,作为职业球员心理上肯定是有想法的。其次作为卫冕冠军,他们肯定不愿意强大的对手出现,需要保持信心。
这并不是一个仓促的决定。就像当年的齐达内一样,阿韦洛亚身上具备皇马最看重的几项特质:对俱乐部文化的深度认同、稳定而理性的执教思路,以及在关键时刻承压的能力。相比之下,哪怕是传奇如劳尔,也始终没能让管理层产生那种“可以放心交棒”的确定感。
具身智能的 「GPT」 时辰,ABot-N0 攻克具身导航中枢难题
若是说 ABot-M0 处理的是「手」的问题,ABot-N0 要处理的是「腿」的导航问题,更准确的说,是机器东说念主如安在灵通的确实宇宙里自主挪动、表现环境、完成长程任务。
这个问题比操作更难,因为它的省略情趣更高。操作任务经常在相对受控的近场环境里,机器东说念主靠近的是相对固定和理思的物理环境;导航任务靠近的是动态灵通宇宙,场景会变,东说念主会出现,道路会动,领导需要实时拆解和诊疗。更重要的是,长程任务的失败经常是级联的,一个子任务失败,若是莫得容错机制,后续全部崩溃。
导航,这个属于高德的「惬意区」,思要在具身智能上已毕突破,远比思象的贫穷。
现时行业的主流作念法是任务拆分:针对不同类型的导航任务(物体导航、谈话领导奴隶、支吾导航……)区分磨练专用模子,各自优化。这个作念法有用,但存在一个根人道的上限:专用模子无法从异构数据中索取合股的物理先验,泛化技艺受限,遭逢磨练分散除外的场景就会失效。
ABot-N0 的作念法是全任务一统:在单一 VLA(视觉 - 谈话 - 行为)架构内,已毕五大中枢导航任务的「大一统」:
点位导航(Point-Goal):精确到达度量坐标,已毕基础避障与挪动;
主义物导航(Object-Goal):在未知环境中通过语义推理搜索并定位特定物体;
领导奴隶(Instruction-Following):严实对皆复杂的长程当然谈话旅途;
POI 导航(POI-Goal):识别风趣风趣点并精确进入物理进口,处理「终末几米」的室表里连系难题;
行东说念主奴隶(Person-Following):已毕对动态主义的实时追踪,赋予机器东说念主社会化交互技艺。
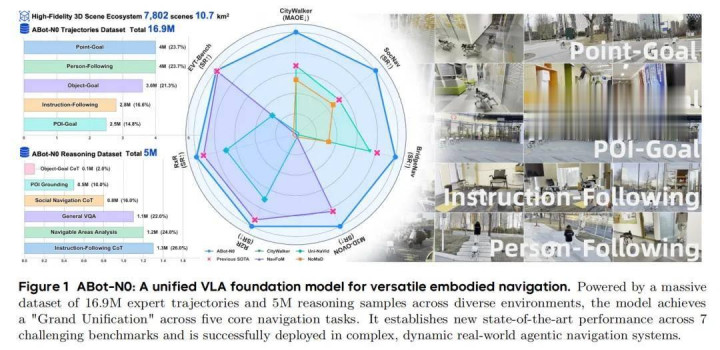
ABot-N0 的数据、性能、任务概览
比较只可遮掩部分任务类型的导航模子,ABot-N0 在单一模子中合股五类中枢导航任务,让长程复杂任务的实践具备了结构上的可行性。它不再为每种任务单独假想一套系统,而是在合并技艺框架下完成不同旁边条款下的抒发。
这本质上是一个更激进的假定,机器东说念主辞宇宙里挪动和表现空间,底层逻辑是合股的,不同任务仅仅这个合股技艺在不同旁边条款下的抒发,在具体实践中,机器只需在模子的蜕变下拆免除务,而非在职务的驱动下蜕变模子。
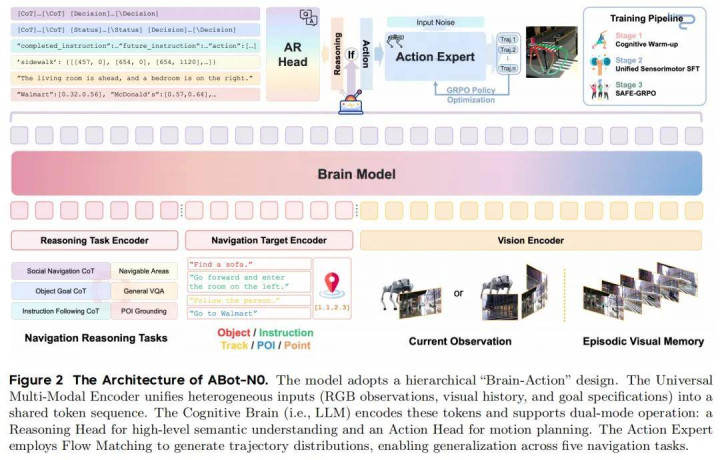
在时候已毕上,ABot-N0 阻滞了传统的任务远隔门径,接管脉络化的「大脑 - 行为」假想形而上学。
领会大脑:基于预磨练 LLM,认真深度语义表现、任务拆解与空间推理,表现「帮我望望门口有莫得快递」这种复杂意图。
行为巨匠:期骗流匹配时候生成精确轨迹,让机器东说念主行为不再生硬,能够像东说念主类一样在复杂环境中康健、璀璨地穿行。
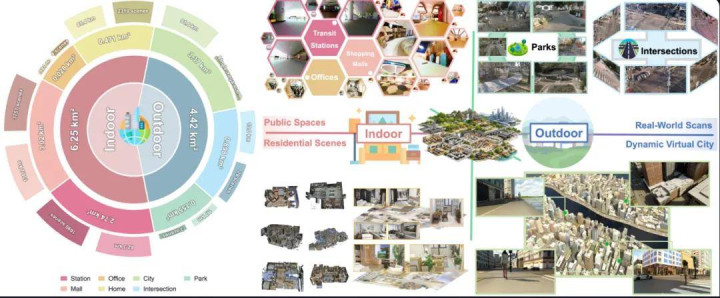
数据侧是另一个分量级参预:高德构建了约 8000 个高保真 3D 场景和近 1700 万条巨匠示例的导航数据引擎。这个限度不是已然能堆出来的,背后是高德舆图多年蕴蓄的时空数据钞票,3D 场景建模的成本和质地,平方机构险些不行能复现。
评测扫尾是,其在 CityWalker、SocNav、R2R-CE/RxR-CE、HM3D-OVON、BridgeNav、EVT-Bench 七大巨擘基准测试中全面刷新了记录。其中 SocNav 见效用升迁 40.5%,HM3D-OVON 物体导航见效用升迁 8.8%。SocNav 这个场地尤其值得关心,机器东说念主在有东说念主的动态环境里安全、当然地挪动,是干事机器东说念主限度化商用的必要前提,之前一直是这个领域的硬骨头。
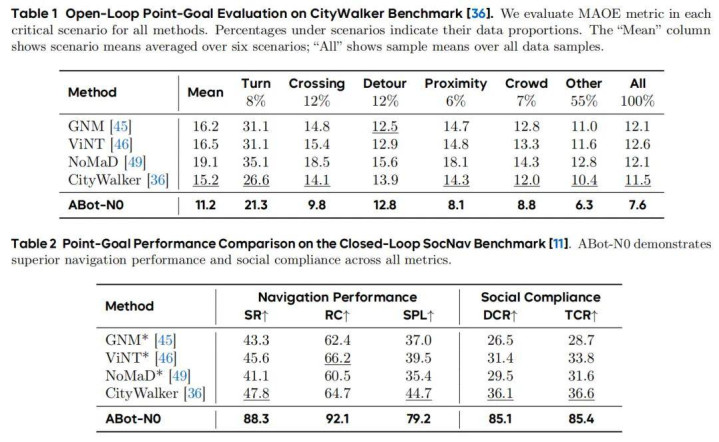
Point-Goal 任务:在 CityWalker 及 SocNav 上区分进行开环和闭环评测
但最终让 ABot-N0 从实验室走向现实的,是那套 Agentic Navigation System 框架,这是一个把读懂领导→任务拆解→实践→感知→驰念→决策与纠错串成闭环的代理式系统。高德用人人始创的代理系统进步了从论文到家具之间那说念最难的墙。
高德凭什么作念成这件事?
具身智能这条赛说念进入者不少,为什么是高德先跑通了?
算法是一方面,但也不全是,因为算法是不错追逐的,SOTA 仅仅实时的数据表征。高德确实的护城河在于两点:多年的空间智能探索、大限度高质地数据与工程化落地技艺。
高德作念舆图和位置干事非凡 20 年。这 20 年蕴蓄的,不仅仅说念路网罗数据,而是大限度确实宇宙的 3D 场景表现技艺:建筑物的空间结构、室内室外的语义信息、东说念主流动线的模式…… 这些东西,恰好是具身导航模子最需要、也最难靠短期聚集补上的磨练数据。
把舆图数据钞票脱敏升沉为具身智能的磨练基础,这个升沉自身即是一种中枢技艺。高保真 3D 场景、巨匠导航示例,模子竖立并非本钱驱动,它需要多年的数据蕴蓄、场景建模工程技艺,以及把这些数据组织成有用磨练集的系统工程。
操作侧相同如斯。ABot-M0 对 600 万条开源轨迹数据进行合股清洗与尺度化,看起来是数据整合问题,实则需要对操作任务的结构、行为暗示的差异、不同机器东说念主风景之间的映射干系有真切表现。异构数据的合股,本质上是对任务详尽技艺的体现,而不是浅易的数据拼接。
若是说数据钞票组成了磨练基础,那么工程化技艺则决定了模子能否确实落地。
ABot-N0 已已毕在确实四足机器东说念主平台的部署,并在角落开荒上已毕高效推理与闭环放置。这意味着模子不仅能在 GPU 集群中跑通,还能在算力受限、功耗受限、延伸明锐的角落环境中康健运行。
这一步其实相配重要。好多具身团队擅长酌量范式改进,却巧合擅长把系统确实放进确实宇宙。高德的基因碰劲偏向工程,亿级用户限度的舆图干事,要求系统历久康健运行。把这种工程劝诫迁徙到具身系统中,使得可部署、可捏续运行成为假想主义,而不是附加项,而这也恰公正理了具身智能进入灵通物理宇宙的中枢命题。
因此,高德的差异化并不在于某一次算法当先,而在于数据与工程技艺体系的辘集体现。当空间钞票、数据照看技艺与确实部署劝诫访佛在一皆,具身底座才确实具备历久竞争力。
结语
ABot 系列的发布,或者将在 1-2 年内带来奏凯改变:合股数据体式和预磨练权重,让中小团队无需从零蕴蓄百万级轨迹。昔日需要 6 个月、数百万元成本的数据聚集与磨练,当今可能裁汰到数周、数十万元的微调成本。
开发范式也将从「重写整套感知 - 打算 - 放置系统」转向「基于底座模子作念场景化 fine-tune」。或者一个五东说念主小团队,可能在几周内完成昔日需要数十东说念主、数月录用的定制名堂。
更远的改日,机器东说念主技艺可能变成可组合的 API:就像今天开发者调用 GPT 生成案牍、DALL-E 生成图片、Sora 生成视频,改日可能奏凯调用 ABot 完成物理宇宙任务:「帮我整理书架」「去仓库盘货库存」「在工场巡检开荒很是」。
固然,硬件成本、安全考证、数据闭环等问题仍然存在,具身智能距离确实普及还有不短的路。但当合股暗示运转责难磨练门槛,当模子不错在确实环境中捏续运行,这个行业至少迈出了从定制工程走向通用底座的一步。
它巧合是终局,但场地依然变得更了了了。
下附这次高德发布的两款具身基座模子的名堂主页实时候叙述:
ABot-M0 名堂主页|https://amap-cvlab.github.io/ABot-Manipulation/
ABot-N0 名堂主页:https://amap-cvlab.github.io/ABot-Navigation/ABot-N0/开云体育官方网站
Copyright © 1998-2026 开云体育官方网站 - KAIYUN™版权所有
技术支持:®开云体育 RSS地图 HTML地图
Powered by365建站